 3
3Hoy vamos a hablar de esta pieza tan fundamental en los vehículos, tanto de combustión como híbridos o eléctricos (en su mayoría), para llevar la potencia a las ruedas de una manera adecuada. Parece tecnología alienígena por lo genial de su mecanismo, así que vamos a intentar descubrir sus secretos para comprenderlo mejor: veremos por qué es necesario, cómo funciona y los tipos de diferenciales que existen.
Por qué es necesario
Vamos a comenzar aclarando que el diferencial solo es necesario en las ruedas motrices, ya que son las que impulsan el coche, y por tanto las que necesitan par que transmitir al suelo.
Imaginemos que tenemos un coche sin diferencial, es decir, las dos ruedas motrices están unidas de manera rígida (como un kart). Circulamos en línea recta a velocidad constante, las ruedas giran normalmente, y en la parte izquierda encontramos un pequeño badén. Fijémonos en el eje motriz: la rueda izquierda va a recorrer unos centímetros más que su compañera, ya que tiene que bajar y subir para recorrer la irregularidad. ¿Qué ocurre? Que la rueda derecha, al recorrer menos distancia, estará más adelante que la otra, provocando un pequeño par de giro hacia la izquierda. Por lo tanto, nos encontramos ante un vehículo que no posee buena estabilidad lineal.
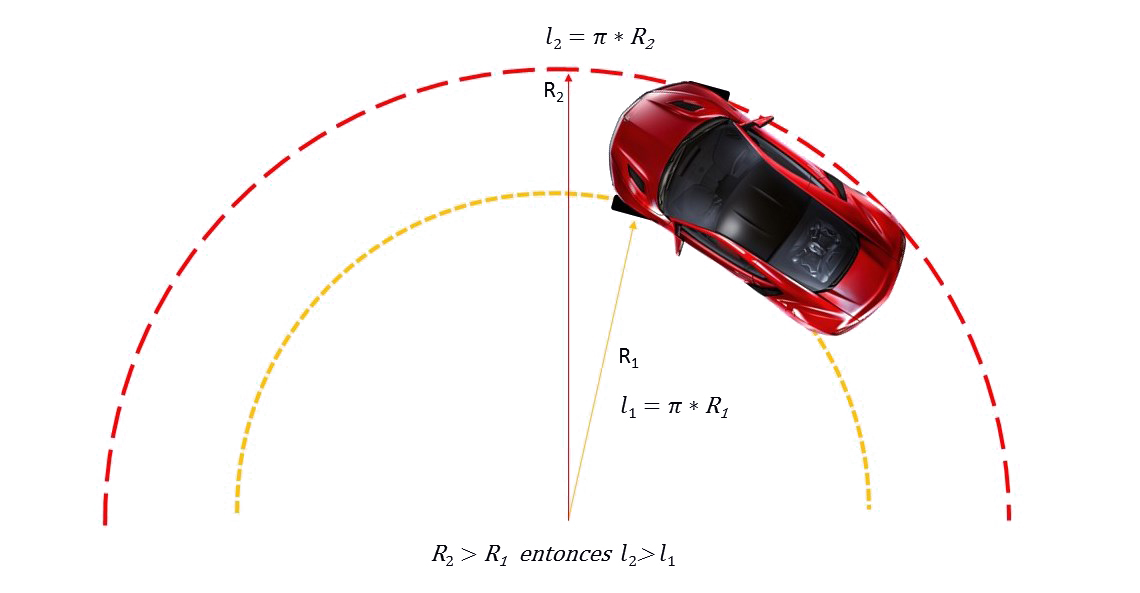
Ya intuimos que es necesario algún mecanismo para remediarlo. Viendo el siguiente ejemplo, nos convenceremos de que es fundamental. Imaginemos el vehículo de antes, negociando una curva. Puesto que la rueda exterior (l2 en la foto) debe recorrer más metros que la interior (l1 en la foto), y las ruedas están unidas de manera rígida, alguna de ellas debe deslizar para mantener las revoluciones de giro de las ruedas. Mal asunto, porque provocamos un desgaste tremendo del neumático, y la estabilidad en curva no va a ser nada buena.
Para solucionar estos dos problemas fundamentales nació el diferencial.
Un poco de historia
Allá por el año 1876, las bicicletas estaban en sus inicios. Sus diseños consistían en una rueda delantera enorme, y una trasera muy pequeña, lo que las hacía de difícil utilidad: era complicado subir y bajar de ellas, por no comentar el manejo tan extraño de su dirección con esas grandes ruedas.
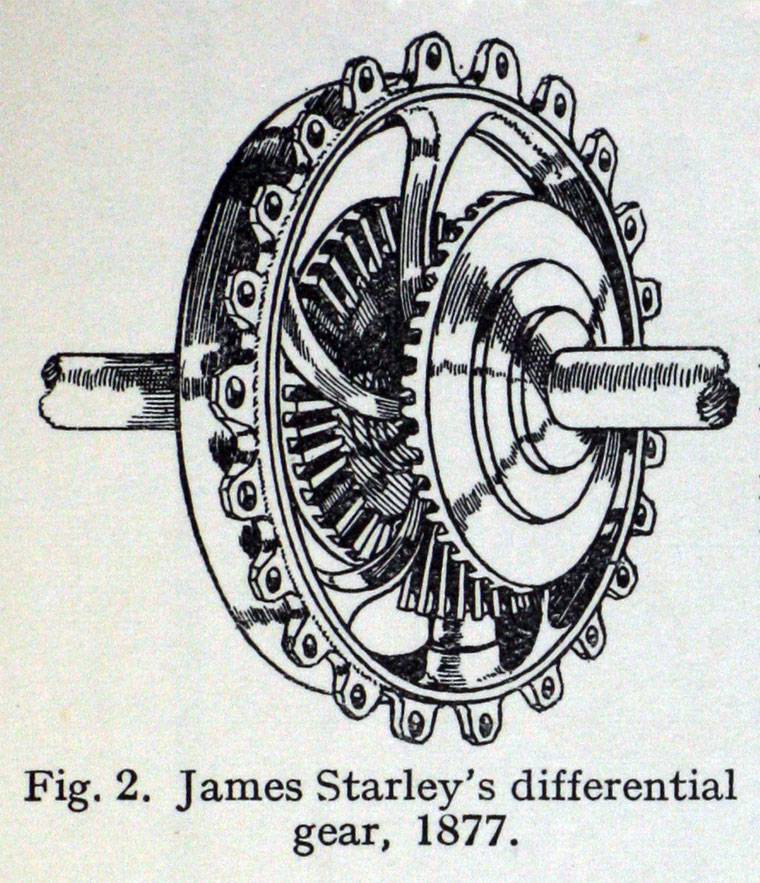
Diferencial Starley

James Starley

Bicicleta Starley
En Coventry (Reino Unido) un hombre llamado James Starley decidió que lo necesario era rediseñar la bicicleta, para que cualquiera pudiera subir y bajar de ella con facilidad. Así surgió su triciclo (podéis ver en una foto al bueno de James con su invento). Colocó dos ruedas grandes detrás, una pequeña delante, y un asiento bastante confortable para pedalear. Al eje del pedalier y su piñón, engranó una cadena que propulsaba el eje trasero con una corona. Una revolución en el diseño de bicicletas de la época. Cuando construyó su primer prototipo y salió a probarlo, inmediatamente se dio cuenta que algo fallaba: el triciclo era difícil de controlar en recta, y en curvas se hacía tan duro el pedaleo, que era incapaz de avanzar.
James, como buen inglés de Coventry, fue al pub por la tarde pensando en la causa de los problemas de su triciclo. Tras tomarse algunas pintas descubrió el fallo: las dos ruedas traseras, al estar unidas mediante un eje rígido, no podían tomar las curvas correctamente debido a la diferente distancia que recorre cada una. Era necesario intercalar entre ellas algún mecanismo que compense el radio de giro de la rueda exterior frente a la interior.
Tras varias semanas dándole vueltas, por fin tuvo una idea brillante y construyó un prototipo. Inmediatamente lo montó en su triciclo y al probarlo quedó maravillado con su comportamiento. Acababa de inventar el diferencial abierto. De este modo, al pedalear, el diferencial compensaba las diferentes distancias recorridas por las ruedas, incluso en curvas.
 Diez años más tarde, cuando Karl Benz construía el primer coche del planeta -en realidad un triciclo motorizado- incluyó el invento de Mr. Starley. Ese sería el primer coche en montar un diferencial.
Diez años más tarde, cuando Karl Benz construía el primer coche del planeta -en realidad un triciclo motorizado- incluyó el invento de Mr. Starley. Ese sería el primer coche en montar un diferencial.
Algunos historiadores indican que quien realmente inventó el diferencial fue Onésiphore Pecqueur en 1827, aunque hay que señalar que el mecanismo diferencial en relojes astronómicos data del año 200 AC como el que utiliza el mecanismo de Anticitera. Lo que sí está claro es que James Starley fue el primero en aplicarlo en un vehículo.
En los años posteriores, aumentó la potencia de los motores, y el diferencial de Starley no aguantaba tanto par, por lo que algunos fabricantes decidieron construir coches sin diferencial. ¿Cómo es posible? Sencillamente llevando la tracción a una sola rueda trasera. De ese modo, la otra rueda gira libre, y no hay problemas de descompensación en giros; pero esta solución demostró ser ineficiente, sobre todo en firmes de tierra, bastante abundantes en la época, disminuyendo con ello la tracción, y haciendo muy difícil el avance.
Aquí es donde entra Packard Motor Car Company de Detroit, perfeccionando el diseño de Benz, y realizando en 1913 el primer diferencial con engranaje cónico. Esto conseguía una transmisión más suave de la potencia, a la vez que más silenciosa. En 1926, Packard introduciría el engranaje hipoide (no es más que un engranaje cónico desplazado hacia abajo), con el que llegamos hasta la actualidad. Esto permite bajar el árbol de transmisión que une el cambio con el diferencial, para que sea menos intrusivo en el habitáculo. Prácticamente todos los vehículos con eje motriz trasero poseen un diferencial con engranaje hipoide. En los tracción delantera, la reducción se realiza con un par simple de engranajes.
En 1958, Vernon Gleasman patenta un nuevo diferencial, que mejora las propiedades del diferencial abierto: nacía el diferencial Torsen de deslizamiento limitado. Más Adelante veremos estos tipos de diferenciales y sus funciones con mayor detalle.
Ubicación
Antes de continuar, vamos a visualizar dónde está ubicado el diferencial. Dependiendo del tipo de tracción que tenga el coche, dispondremos de uno a tres diferenciales. En la imagen hemos representado los tres tipos más frecuentes: delantera, trasera y total. Dentro de estas puede haber variaciones, como por ejemplo, un coche con motor transversal delantero con tracción total (Ford Focus RS, Audi RS3), uno con motor longitudinal y cambio que incorpora la caja de transferencia, el diferencial central y el delantero (Subaru WRX, Audi RS4), etc. Para simplificar nos centraremos en las tres de la imagen.
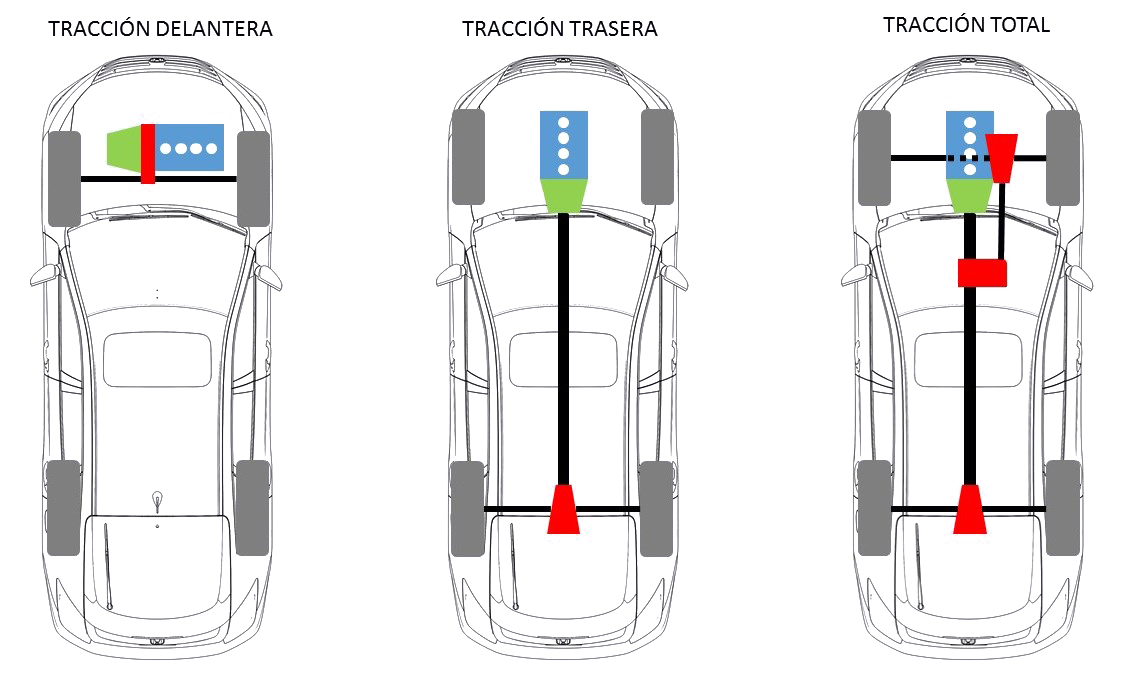
Hemos representado el motor en azul, cambio en verde, árboles de transmisión en negro y diferencial en rojo
En un vehículo con tracción delantera y motor transversal (la mayoría de los que encontramos en el mercado actualmente), el diferencial se ubica entre el motor y el cambio, pero detrás de ambos. En esta configuración el engranaje de reducción no es hipoide, sino un par simple de engranajes, como pueden ser los que encontramos en el cambio. Es decir, dos ruedas dentadas de diferente diámetro.
En un vehículo de propulsión trasera, el diferencial se encuentra conectado al cambio a través del árbol de transmisión. En este caso encontramos que el engranaje de reducción es hipoide.
En un vehículo de tracción total tendremos tres diferenciales: el central que se encarga de dividir el par entre el eje delantero y trasero; y un diferencial en cada eje, para distribuir el par a cada rueda. Añadido a esto, es necesaria una caja de transferencia central, para distribuir el par en el eje delantero, que no suele tener reducción, por lo que los engranajes serán del mismo tamaño. Normalmente, el empaquetado es bastante complicado en esta configuración, por lo que en muchas ocasiones uno de los palieres delanteros tiene que atravesar el cárter de aceite del motor, para poder llegar al otro lado. Por eso hemos puesto una línea discontinua en la imagen.
Dependiendo si el diferencial es central, delantero o trasero, el fabricante escogerá un tipo u otro, dado que sus cualidades varían
Puesto que es muy complicado entenderlo de manera estática, leyendo y mirando una foto, os adjunto un vídeo de 1937 que aun siendo muy antiguo, creo que es con diferencia el más claro en la explicación:
Partes de un diferencial
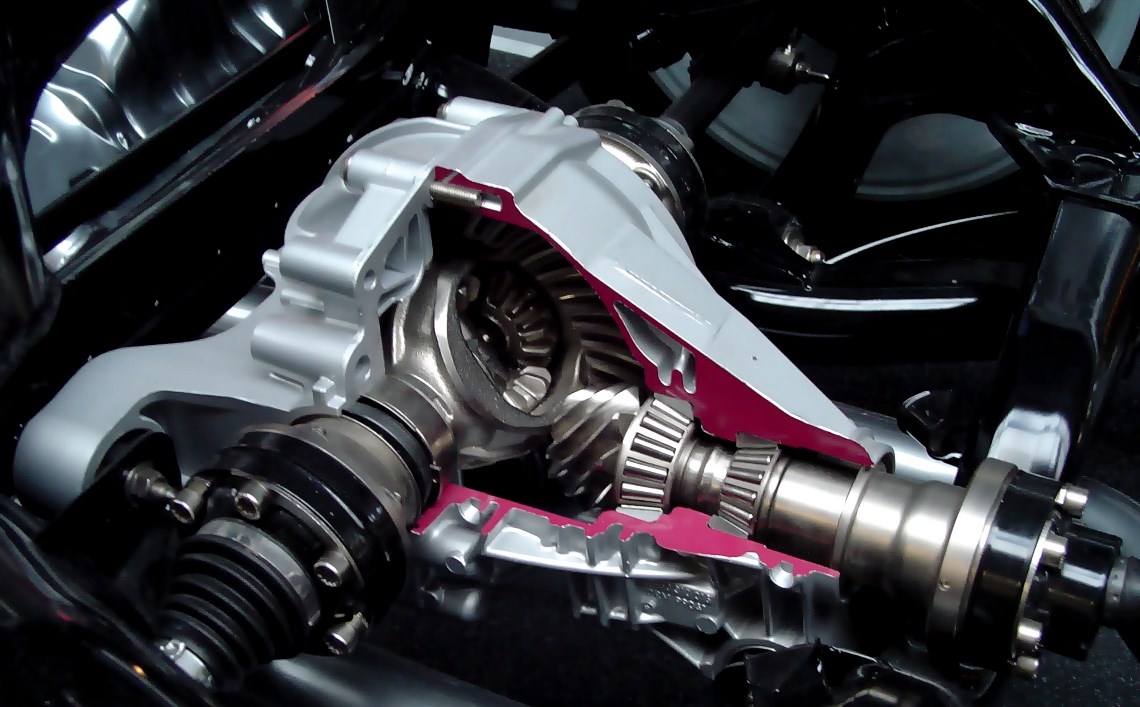
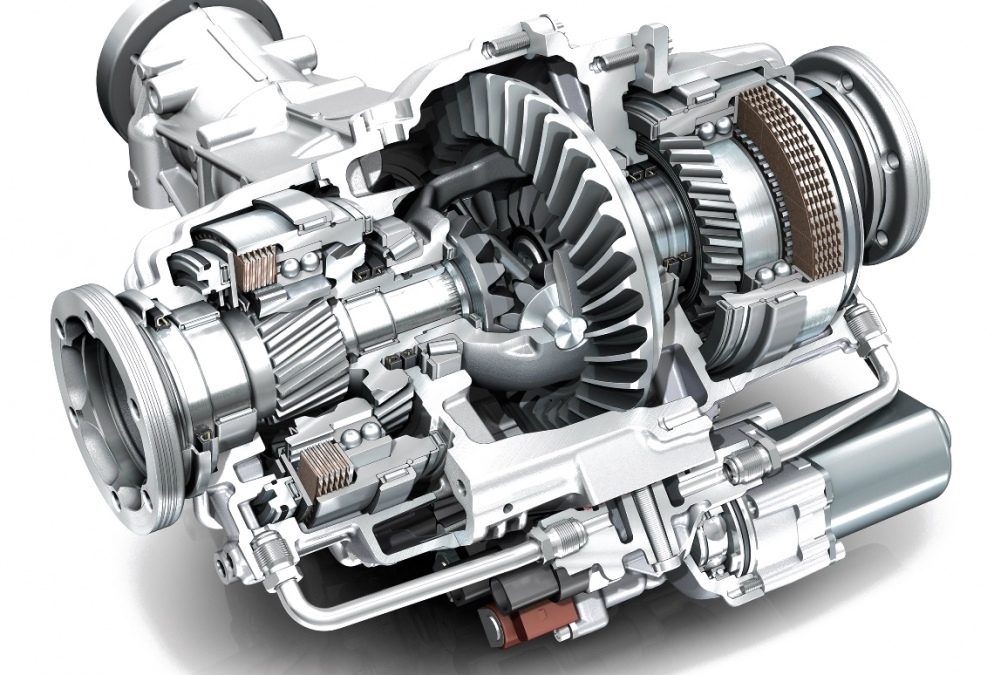
En la imagen inferior podéis ver un diferencial abierto -el que monta la mayoría de coches- de un vehículo con eje motriz trasero.
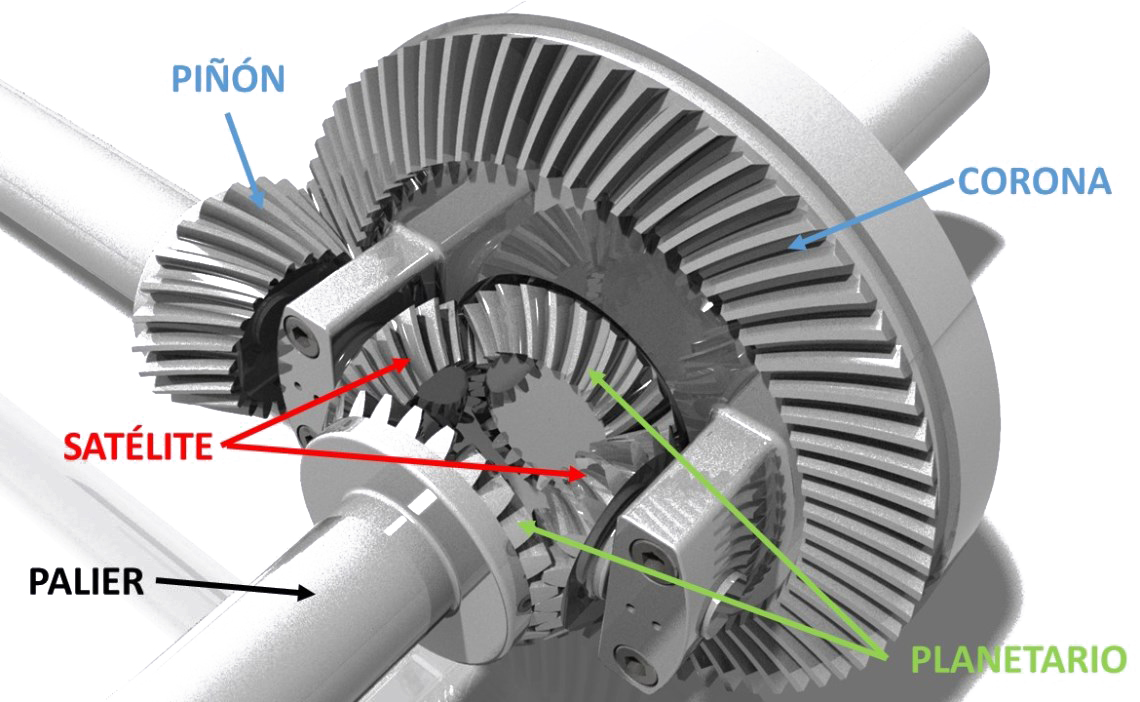 En azul vemos el engranaje de reducción, formado por el piñón que está unido al árbol de transmisión que proviene del cambio, y la corona, que está unida al diferencial. Esto es el engranaje hipoide (el eje longitudinal del piñón no coincide con el centro de la corona). ¿Para qué es necesario este engranaje? Para cambiar la dirección de la fuerza 90º y para adaptar el giro del motor a la velocidad de rotación de las ruedas. Lo veremos en detalle en el siguiente punto.
En azul vemos el engranaje de reducción, formado por el piñón que está unido al árbol de transmisión que proviene del cambio, y la corona, que está unida al diferencial. Esto es el engranaje hipoide (el eje longitudinal del piñón no coincide con el centro de la corona). ¿Para qué es necesario este engranaje? Para cambiar la dirección de la fuerza 90º y para adaptar el giro del motor a la velocidad de rotación de las ruedas. Lo veremos en detalle en el siguiente punto.
Las partes que realizan la función diferencial como tal son los satélites (rojo) y los planetarios (verde). Los planetarios están unidos de manera rígida a los palieres que transmiten la fuerza a cada rueda, mientras los satélites giran libremente sobre su eje. Uno de los planetarios siempre estará unido a la corona, estando conectado al otro planetario mediante el engranaje con los satélites.
Más adelante intentaremos explicar qué función realiza cada parte.
Engranaje de reducción
Vamos ahora a fijarnos en el engranaje de reducción -piñón y corona en la imagen- y por qué es necesario. La mejor manera es que utilicemos un ejemplo. Vamos a realizar unos cálculos simples, aproximando a cifras redondas para no complicarlo en exceso.
Supongamos que circulamos en nuestro coche que calza neumáticos 205/50 R17, en quinta marcha a 120 km/h, con el motor girando a 3.000 RPM. Vamos a suponer que el desarrollo de la quinta es 1:1, una directa. ¿A cuántas revoluciones por minuto giran las ruedas?
Vamos a hacer unos cálculos rápidos para averiguarlo. Primero calculamos la longitud de la circunferencia de nuestras ruedas. El radio de esos neumáticos es aproximadamente 31,2 cm. Por tanto, si multiplicamos por 2 y por π nos da un resultado cercano a 2 metros. Por tanto, con una vuelta completa de la rueda avanzamos 2 metros. Ahora cambiamos las unidades de la velocidad: 120 km/h es aproximadamente 33 m/s. Casi lo tenemos.
Si dividimos la velocidad, entre la longitud de la circunferencia de la rueda, tenemos la frecuencia de giro en hercios (ciclos por unidad de tiempo): 33 m/s entre 2 m nos da un resultado de 16,5 Hz. Como 1 Hz es un giro por segundo, no hay más que multiplicar por 60 segundos para tener las revoluciones por minuto. El resultado es que las ruedas giran a 1.000 RPM.
Recapitulemos: tenemos el motor que gira a 3.000 RPM; la relación del cambio es 1:1, por lo que el árbol de transmisión también gira a 3.000 RPM; pero, en cambio, las ruedas giran a 1.000 RPM. ¿Qué necesitamos? Un engranaje reductor que adapte ambos giros. Si dividimos el giro del motor entre las ruedas, obtenemos una relación de 3:1. Es decir, la corona tendrá tres veces más dientes que el piñón. Una relación de reducción de 3:1 es bastante habitual, aunque es variable en función de las características de cada pareja motor-cambio.
Conociendo la relación de reducción, el tamaño de las ruedas, la relación de cambio y el giro máximo del motor, podemos calcular la velocidad máxima teórica que puede conseguir un coche, si tuviese potencia suficiente, sin olvidarnos de la aerodinámica. Por ello, si cambiamos los neumáticos de serie por otros de diferente medida, debemos ser cuidadosos con la elección para no alterar el desarrollo final.
El engranaje reductor, aunque se empaqueta dentro de la caja del diferencial, no hay que confundirlo con el diferencial mismo, ya que cumple con otra función diferente, que es la de adaptar el giro del motor al de las ruedas.
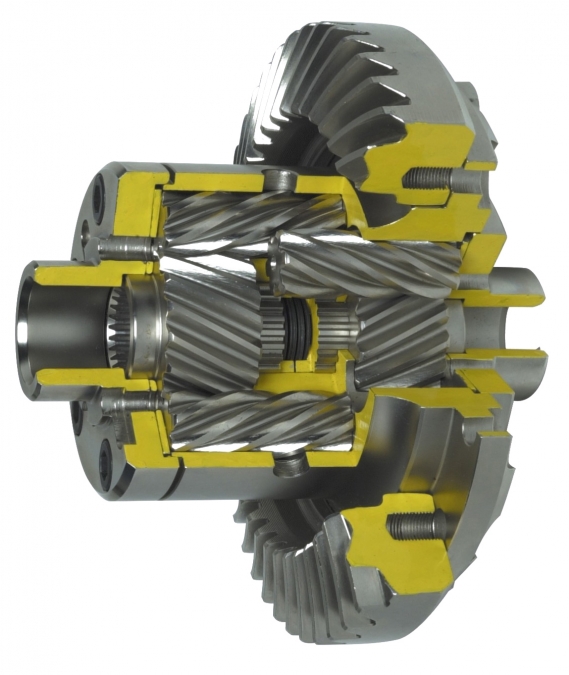
Cómo funciona
 En la imagen podéis ver un diferencial abierto, que vamos a tomar como ejemplo por ser el más común. La corona del engranaje reductor iría colocada en la parte derecha, donde están los huecos roscados. Por tanto todo el bloque del diferencial gira junto a la corona. Si ambas ruedas giran a la misma velocidad, los planetarios girarán a la misma velocidad, y en consecuencia los satélites permanecerán estacionarios. Es decir, giran con el conjunto, pero no sobre sí mismos (giran sobre el eje perpendicular a su eje longitudinal).
En la imagen podéis ver un diferencial abierto, que vamos a tomar como ejemplo por ser el más común. La corona del engranaje reductor iría colocada en la parte derecha, donde están los huecos roscados. Por tanto todo el bloque del diferencial gira junto a la corona. Si ambas ruedas giran a la misma velocidad, los planetarios girarán a la misma velocidad, y en consecuencia los satélites permanecerán estacionarios. Es decir, giran con el conjunto, pero no sobre sí mismos (giran sobre el eje perpendicular a su eje longitudinal).
Si una rueda gira a mayor velocidad, por una curva, diferente tracción o un badén, un planetario girará más rápido que el otro, y por tanto ahora los satélites giran sobre sí mismos, y a la vez giran con el conjunto (sobre el eje perpendicular al axial, y sobre el longitudinal).
Ahora que entendemos cómo funciona un diferencial, vamos a ver qué tipos hay y cuáles son sus ventajas.
Tipos
Diferenciales abiertos
Es el diferencial que hemos visto en el apartado anterior. Cumple las funciones básicas de transmitir el par a ambas ruedas por igual, y compensar la diferencia de giro, aunque posee una desventaja algo problemática: cuando una de las ruedas tiene menos adherencia que la otra, la totalidad del par se dirige a la rueda que patina, o sea, a la de menos adherencia, lo cual hace que perdamos la tracción, y por tanto que no avancemos.
Se suele incorporar en la mayoría de vehículos al ser de sencilla construcción, económico y robusto, por tanto puede ir en ubicación delantera o trasera. Algunos ejemplos: Nissan GT-R en el eje delantero, o BMW en sus modelos no “M”, y prácticamente en todos los tracción delantera, algo aparentemente contradictorio debido a su enfoque deportivo: Porsche tradicionalmente siempre ha usado diferenciales abiertos, salvo en sus modelos más extremos.
Tiene una transmisión teórica de par entre ruedas de 1:1 -en la práctica debido a rozamientos, puede ser de aproximadamente 1,3:1- también llamada TBR (Torque Bias Ratio), es decir, un valor en porcentaje de 0%. ¿Qué quiere decir esto? Que es incapaz de transmitir par de una rueda a otra cuando desliza. Cualquier TBR mayor de 1 significa que estamos ante un diferencial de deslizamiento limitado, que “quita” par a la rueda que desliza, para “dárselo” a la otra.
Por ejemplo, un diferencial con TBR de 2:1 (33 %) significa que una rueda puede tener el 66,5 % del par de ese eje como máximo (su 50 % más el 33 % del otro 50 %) y el 33,5 % como mínimo (50 % – (33 % * 50 %)). Entre esos valores, la rueda puede disponer de cualquier porcentaje, en función del tipo de diferencial y de la adherencia de la rueda. Comentar que el concepto de TBR nació con los diferenciales Torsen, pero al ser un concepto intuitivo, se emplea en todo tipo de diferencial como comparador de su capacidad de traspaso de par. Un calculador rápido para equivalencia entre TBR y porcentaje lo podéis encontrar aquí.
Bloqueables
Para solucionar en gran medida el problema anterior de la pérdida de tracción, se incorporó al diferencial abierto un bloqueo (mecánico, hidraúlico, neumático o electrónico), concretamente a los satélites. Al estar bloqueados y no poder girar sobre sí mismos, transmiten la potencia al 50% a cada rueda, eso sí, a costa de no realizar la función diferencial.  Por este motivo, este tipo de diferenciales se incorporan a vehículos con capacidades todo terreno, y se recomienda su uso a muy baja velocidad, para superar algún obstáculo, ya que las ruedas giran de manera solidaria.
Por este motivo, este tipo de diferenciales se incorporan a vehículos con capacidades todo terreno, y se recomienda su uso a muy baja velocidad, para superar algún obstáculo, ya que las ruedas giran de manera solidaria.
Dependiendo del fabricante, se puede incorporar este bloqueo a uno, a dos o a los tres diferenciales. Posee un TBR 1:1, al ser diferenciales abiertos, incapaces de restar par a la rueda que desliza. Un vídeo muy interesante muestra el funcionamiento del Audi Ur-Quattro, con tres diferenciales abiertos, dos de ellos bloqueables. Lo podéis ver en “El principio Quattro”.
Este diferencial soluciona alguna de las carencias del diferencial abierto, pero solamente a baja velocidad. ¿Y si existiera algún tipo de diferencial que, aparte de compensar el giro de las ruedas, transmitiera el par de manera variable en función de la adherencia para mejorar la tracción? La respuesta son los diferenciales de deslizamiento limitado o Limited Slip Differential (LSD).
De deslizamiento limitado (LSD)
Este apartado daría para escribir una enciclopedia completa, debido a la variedad existente de diferenciales autoblocantes o de deslizamiento limitado. Vamos a resumirlo lo máximo posible para que resulte comprensible. Podemos emplear diferentes criterios para clasificar los diferenciales. Nosotros los dividiremos en cuatro tipos:
- Tipo embrague
- Tipo viscoso
- Tipo rígido
- Tipo activo

Diferencial de rampas
Diferencial de corona
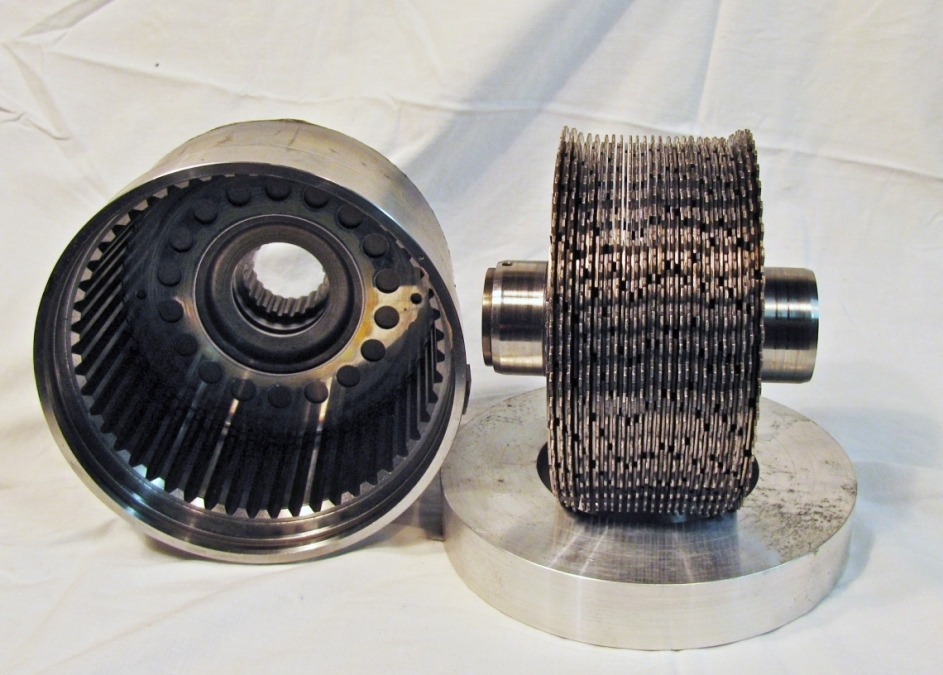
Diferencial tipo embrague
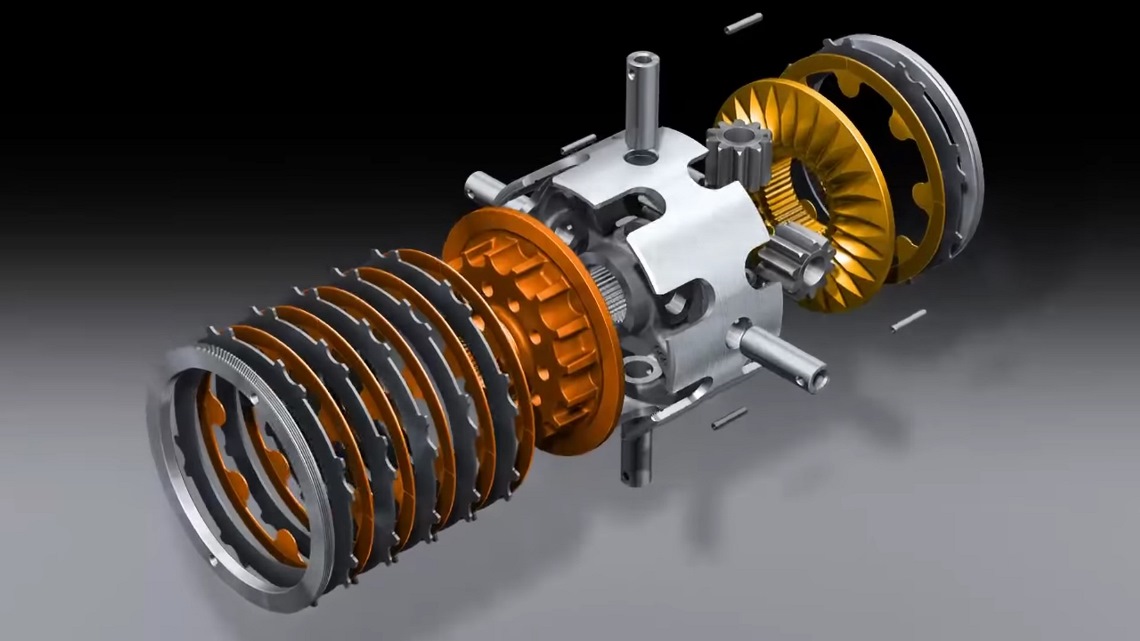
Este diferencial es un pelín complicado de explicar, intentaremos ser lo más claros posible. Partimos de un diferencial abierto con el eje de los satélites y sus planetarios, pero haremos algo diferente: el eje de los satélites tendrá un poco de holgura en la carcasa, donde tallaremos algo parecido a un triángulo. En los lados de los planetarios, colocaremos unos discos de fricción acoplados a la carcasa del diferencial, e intercalados, unos discos de acero acoplados al planetario. Puesto que los discos están intercalados, deberemos incorporar un muelle de presión que los engrane, para que a las ruedas les llegue par.
De esta manera, cuando una de las ruedas gira más que la otra, se genera una fuerza tal que la cuña de los planetarios empujará los discos de ambos lados, bloqueando el diferencial. Estos discos no son más que un embrague que al acoplarse, funcionan como un diferencial bloqueado. En situación normal, al girar, los discos deslizan entre sí permitiendo que una rueda gire más rápido que la otra. Como un video vale más que mil imágenes, aquí os dejo uno con la explicación.
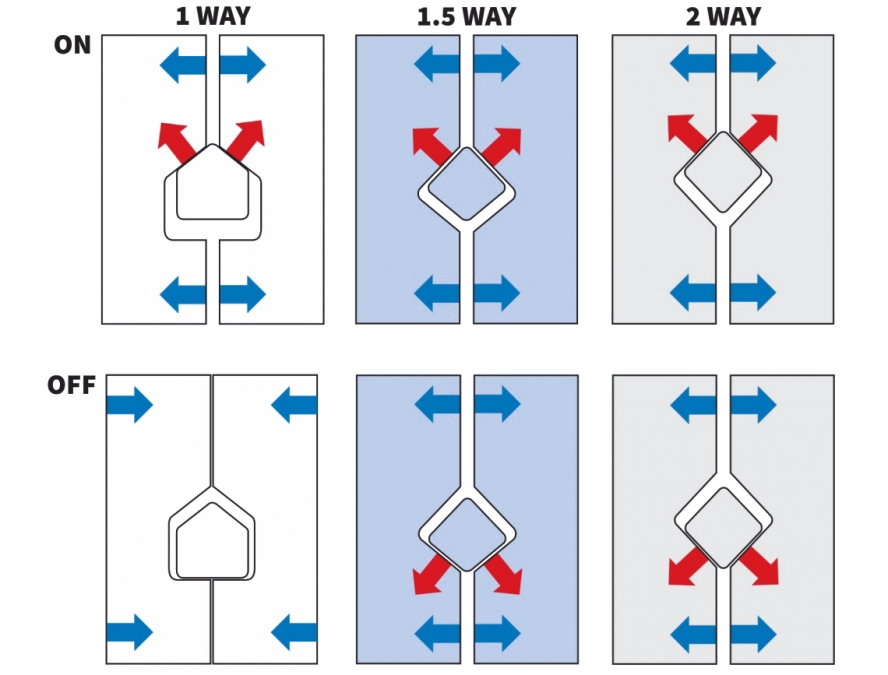
En función de la forma del corte de la carcasa, podemos hablar de diferenciales de 1 vía, 1,5 vías o 2 vías. Los de 1 vía funcionan solo en aceleración. Los de 1,5 vías, en aceleración y muy poco en frenada. Los de 2 vías funcionan igual en aceleración y en frenada, y no son recomendables en carretera, debido a los problemas de estabilidad que plantean al frenar.
 Se suelen emplear en vehículos deportivos como diferencial trasero, aunque hay alguna excepción. Mención especial merece el diferencial de corona de Audi, usado en algunos modelos Quattro, como el RS4 o RS5. Lo emplean como diferencial central y se basa en el mismo principio que el diferencial de discos, con algunas ligeras variaciones, llegando en este caso a un TBR de 1,667:1.
Se suelen emplear en vehículos deportivos como diferencial trasero, aunque hay alguna excepción. Mención especial merece el diferencial de corona de Audi, usado en algunos modelos Quattro, como el RS4 o RS5. Lo emplean como diferencial central y se basa en el mismo principio que el diferencial de discos, con algunas ligeras variaciones, llegando en este caso a un TBR de 1,667:1.
Dependiendo del material de fricción de los discos, pueden tener diversos TBR. Puede variar de 2:1 (33 %) a 400:1 (99,5 %), o incluso más. Este tipo de diferenciales son usados por BMW en sus vehículos “M”, y en competición. Os dejo un vídeo donde podéis ver la comparativa entre un diferencial abierto, otro LSD al 25 % (TBR de 1,667:1) y el diferencial de discos. La desventaja de este diferencial es que el acoplamiento es algo brusco y que requiere mantenimiento, debido al desgaste de los discos. Como ventaja, podemos mencionar que su TBR puede variar de 2 a 400, en función de la adherencia de cada rueda.
Diferencial de acoplamiento viscoso o Ferguson
Se trata de una serie de discos, acoplados cada uno a un eje -primario o entrada y secundario o salida- y sumergidos en un fluido viscoso, normalmente con alto contenido en silicona.
 Cuando el eje primario desliza, comienza a girar a mayor velocidad, aumentando la viscosidad del fluido, y por tanto, acoplando los discos, es decir, bloqueando el diferencial.
Cuando el eje primario desliza, comienza a girar a mayor velocidad, aumentando la viscosidad del fluido, y por tanto, acoplando los discos, es decir, bloqueando el diferencial.
Con este tipo de diferencial, el comportamiento del vehículo es como si fuese dos ruedas motrices, ya que solamente se bloquea y transmite fuerza al otro eje cuando el primario desliza.
Se suele emplear como diferencial central y su TBR es variable en función del número de discos, su material y tamaño. Si tenéis tiempo y queréis entenderlo mejor, os dejo un par de vídeos de Lancia (parte 1 y parte 2), lo empleaban como diferencial central en su Delta y Prisma 4×4.
Diferencial tipo rígido
Aunque existe el diferencial epiciloidal o planetario, que también puede realizar distribución de par (como en el Toyota Prius, para distribuir la potencia del motor térmico entre el generador eléctrico y las ruedas), personalmente no conozco ningún vehículo que posea un diferencial de este tipo como diferencial de eje motriz. Por tanto, nos centraremos en el diferencial tipo Torsen, ampliamente utilizado en multitud de vehículos.
Como comentamos, el diferencial tipo Torsen (Torque Sensing) fue patentado en 1958, y su patente caducó en 1978, veinte años después. Al caducar la patente, el diseño queda liberado para que cualquiera lo pueda utilizar; aunque los propietarios de la patente registraron la marca “Torsen”, por lo que ningún fabricante de diferenciales de este tipo puede utilizar esta denominación. Es por esto que habéis oído hablar de los diferenciales Quaife, Wavetrac, Eaton… pero que en definitiva son Torsen. Veamos cómo funciona.
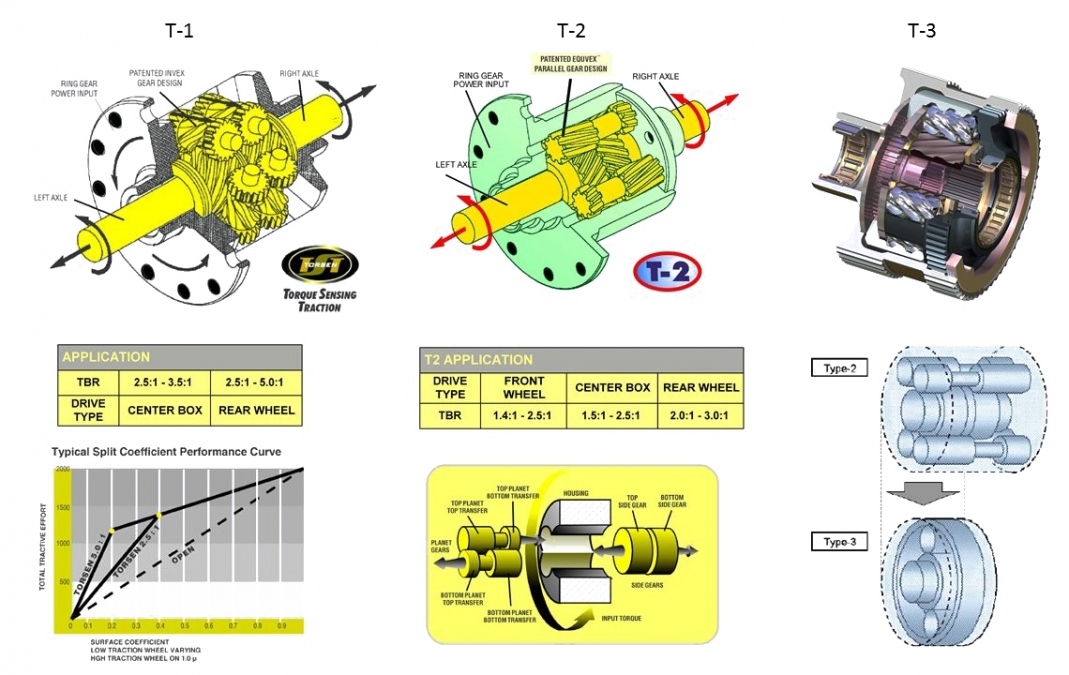 Existen básicamente dos tipos de diferencial Torsen: el T-1 y el T-2. La diferencia es que en el T-1 los satélites se colocan perpendiculares al eje del diferencial, mientras en el T-2 se colocan de manera paralela. Existen también las variantes T-2R (para competición) y T3 (más compacto) pero no son más que una evolución del T-2.
Existen básicamente dos tipos de diferencial Torsen: el T-1 y el T-2. La diferencia es que en el T-1 los satélites se colocan perpendiculares al eje del diferencial, mientras en el T-2 se colocan de manera paralela. Existen también las variantes T-2R (para competición) y T3 (más compacto) pero no son más que una evolución del T-2.
¿Qué aporta el Torsen? Mientras los otros diferenciales autoblocantes dependen de una condición para iniciar su trabajo, el Torsen trabaja de manera continua, realizando la transición de par de manera suave de una rueda a otra. El acoplamiento es rígido y continuo, por lo que no existen discontinuidades en su funcionamiento como en el de discos o el viscoso. El mantenimiento en este tipo de diferenciales se limita al cambio de aceite tras su intervalo programado. Recordemos que en el diferencial de discos, es necesario cambiar los discos de fricción también debido al desgaste.
El T-1 es de funcionamiento más brusco, aunque aguanta mayor par que el T-2. Por este motivo puede tener un TBR de 2,5:1 a 5:1. Por el contrario, el T-2 es más suave y silencioso, realizando transiciones más suaves y predecibles. Su TBR oscila de 1.4:1 a 3:1.
 El T-3 posee la particularidad de que inicialmente reparte mayor par a uno de los dos ejes. Es por esto que se emplea como diferencial central, haciendo un reparto inicial 65:35 entre el eje trasero y delantero. Audi lo ha empleado mucho en sus modelos Quattro de motor longitudinal, aunque ahora ha introducido el diferencial central de corona, del que hemos hablado antes. Normalmente este fabricante emplea un diferencial abierto en el eje delantero, un T-3 como central y un T-2 en el trasero. No se suele emplear un diferencial autoblocante en el eje delantero, ya que induciría esfuerzos parásitos en la dirección (torque steer), optando la mayoría de fabricantes por uno abierto; aunque claro está, existen excepciones como por ejemplo el Opel Astra OPC, que monta un LSD de discos. El Nissan Juke Nismo RS, por ejemplo, padece ese efecto parásito en la dirección.
El T-3 posee la particularidad de que inicialmente reparte mayor par a uno de los dos ejes. Es por esto que se emplea como diferencial central, haciendo un reparto inicial 65:35 entre el eje trasero y delantero. Audi lo ha empleado mucho en sus modelos Quattro de motor longitudinal, aunque ahora ha introducido el diferencial central de corona, del que hemos hablado antes. Normalmente este fabricante emplea un diferencial abierto en el eje delantero, un T-3 como central y un T-2 en el trasero. No se suele emplear un diferencial autoblocante en el eje delantero, ya que induciría esfuerzos parásitos en la dirección (torque steer), optando la mayoría de fabricantes por uno abierto; aunque claro está, existen excepciones como por ejemplo el Opel Astra OPC, que monta un LSD de discos. El Nissan Juke Nismo RS, por ejemplo, padece ese efecto parásito en la dirección.
Como desventaja, debemos mencionar la condición de nula adherencia (rueda en vuelo). En este caso el diferencial Torsen se comporta como un diferencial abierto. Es decir, enviará todo el par a la rueda que está en el aire, perdiendo la tracción. Para evitar esta condición, Wavetrac ha diseñado un diferencial Torsen con precarga, que evita precisamente esto.
Diferenciales activos
En los últimos tiempos, la electrónica lo ha invadido todo, y los diferenciales no podían ser menos. Vamos a enumerar los tres tipos más importantes en cuanto a diferenciales activos.
Haldex
El diferencial Haldex puede que sea el más famoso de todos. Básicamente se trata de un diferencial como el de discos, con discos de fricción intercalados, donde el bloqueo se maneja a través de una pequeña bomba de aceite que introduce o elimina presión a los discos, para así bloquear o no el diferencial.
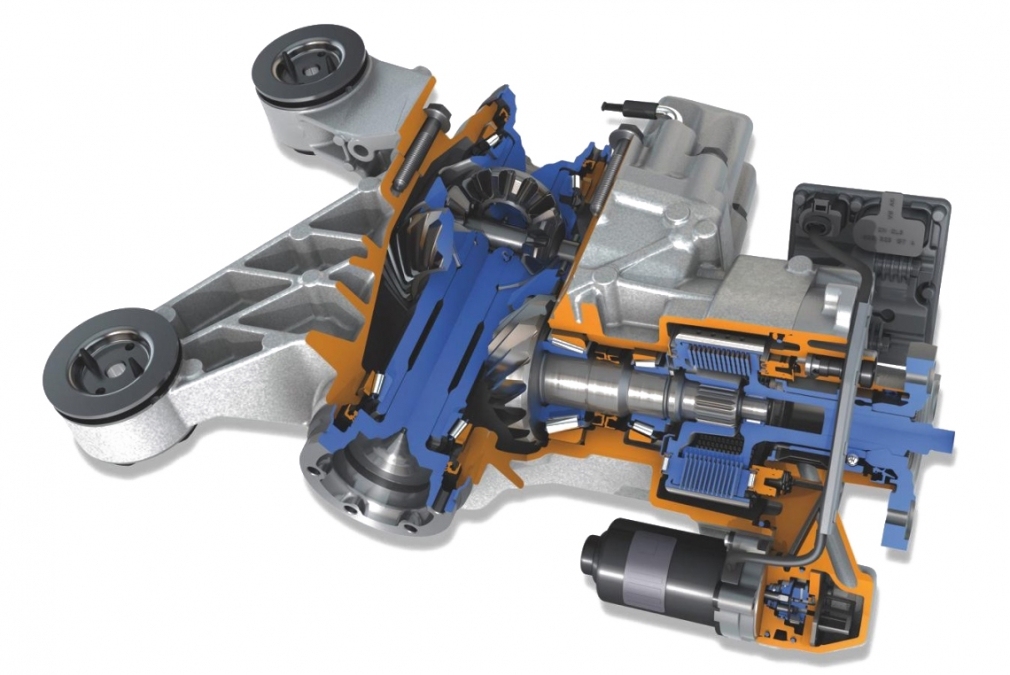 Esta bomba es manejada de manera electrónica, por tanto, podríamos definirlo como un embrague electro-hidráulico controlado electrónicamente.
Esta bomba es manejada de manera electrónica, por tanto, podríamos definirlo como un embrague electro-hidráulico controlado electrónicamente.
El embrague Haldex fue el que ha democratizado la tracción total en vehículos con motor transversal. Recordemos el 4Motion de Volkswagen o la tracción Quattro del Audi A3 y TT.
Al igual que el viscoso, el Haldex se utiliza como diferencial central, y los coches se comportan como dos ruedas motrices (normalmente tracción delantera). Cuando se da una condición de baja adherencia, mediante los sensores del coche, se activa el bloqueo del Haldex, pasando par al eje trasero. En las primeras versiones ese traspaso se realizaba de una manera un tanto brusca, siendo necesario un deslizamiento notable del tren delantero para que entrase en acción. Actualmente va por la quinta generación, habiendo refinado y anticipado su funcionamiento, haciendo prácticamente imperceptible para el conductor su entrada en acción.
Electrónicos con control vectorial de par o torque vectoring
Existe otra modalidad que se está imponiendo en la gama alta de vehículos deportivos muy prestacionales. Este diferencial, bastante complejo y pesado, es una versión duplicada del Haldex, pero para ser utilizado en el eje motriz trasero. A cada lado del diferencial monta unos discos, que a su vez están conectados a una válvula y a una bomba de aceite controlada electrónicamente.
 Cuando la electrónica considera que es necesario más par en la rueda derecha (curva a izquierdas, por ejemplo), activa la válvula de ese lado y la bomba entre en funcionamiento, enviando más presión a los discos de la parte derecha, provocando con ello mayor transmisión de par a esa rueda. Exactamente lo mismo puede hacer con la rueda opuesta. Por tanto, es como si dispusiéramos de dos embragues Haldex, cada uno conectado a un semieje.
Cuando la electrónica considera que es necesario más par en la rueda derecha (curva a izquierdas, por ejemplo), activa la válvula de ese lado y la bomba entre en funcionamiento, enviando más presión a los discos de la parte derecha, provocando con ello mayor transmisión de par a esa rueda. Exactamente lo mismo puede hacer con la rueda opuesta. Por tanto, es como si dispusiéramos de dos embragues Haldex, cada uno conectado a un semieje.
Estos diferenciales son muy útiles, puesto que se puede regular de manera muy exacta cuando activarlo y cuanto par se envía a cada rueda. Por el contrario, el coste, el peso y el desgaste son puntos que juegan en su contra. Cabe destacar también que en condiciones muy exigentes de funcionamiento, debido al rozamiento de sus discos y la alta presión de aceite, se pueden sobrecalentar y dejar de realizar su función, hasta que se recupere la temperatura de servicio. Podéis ver un video con este tipo de diferencial en funcionamiento a continuación:
Virtuales
Por último tenemos los diferenciales autoblocantes virtuales. Esta es la versión más económica de un LSD, ya que se basa en un diferencial abierto y la actuación de los frenos. ¿Cómo funciona? Recordemos que el diferencial abierto tenía la desventaja de enviar más par a la rueda que más desliza, justo lo contrario de lo que deseamos. Mediante la electrónica, se detecta ese deslizamiento, y se activa el freno solamente en la rueda que desliza. Automáticamente el diferencial abierto mandará más par a la otra rueda, ya que ofrece menos resistencia que la que está frenada.
Su principal desventaja es que produce más fatiga en el sistema de frenado, especialmente en una utilización intensa. Está pensado para un uso más esporádico, ahorrando el peso y consumo de los diferenciales de los tipos descritos anteriormente.
Es algo muy inteligente y económico, pues se puede emplear en cualquier vehículo actual. De hecho, cuando vemos que se publicita un vehículo con torque vectoring -salvando los que emplean un diferencial activo- no es más que lo que acabamos de ver: un diferencial abierto con deslizamiento limitado a través del frenado selectivo. Este tipo es empleado masivamente en la mayoría de vehículos del segmento SUV. Podéis verlo en funcionamiento en el caso del Porsche 718 Cayman:
Como reseña, citar que también se puede realizar el frenado selectivo, aunque dispongamos de un LSD, para acentuar el par de giro. Esto es empleado por Audi en algunos de sus modelos Quattro.
Hasta aquí nuestro repaso sobre este dispositivo que, como habéis visto, es fundamental para disponer de una buena tracción en nuestros vehículos, y compensar las diferencias de giro de las ruedas motrices. Sé que nos hemos dejado muchos detalles en el tintero, pero la idea era disponer de una visión global acerca de su funcionamiento y las diferentes opciones que nos ofrecen los fabricantes para solucionar diversas situaciones a las que nos podemos enfrentar, como puede ser avanzar sobre nieve, o salir más rápido de una curva en un circuito con gas a fondo.
Como conclusión podemos decir que un buen diferencial autoblocante puede hacer la conducción mucho más divertida y efectiva que un diferencial abierto, que al final es lo que buscamos al conducir.
Este obra, cuyo autor soy yo mismo, se publicó el 19 de septiembre de 2016 bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.
Pablo Mayo
Ingeniero de profesión, la mayor pasión de mi vida son los coches desde que era un chaval. El olor a aceite, gasolina, neumático...hace que todos mis sentidos despierten. Ahora embarcado en esta nueva aventura, espero que llegue a buen puerto con vuestra ayuda. Gracias por estar ahí.Un artículo completamente erróneo. Existe desde hace años consenso en que el mecanismo de Anticitera no incorporaba un mecanismo diferencial. Onésiphore es considerado el inventor del mecanismo diferencial, propuesto por él mismo como mejora al vehículo de Cugnot .
Claro, el artículo es completamente erróneo porque tú consideras que un dato es erróneo. Buen silogismo.